| **Étape** | **Manière de procéder** | **Graphique / Élément de commande** |
| 1 | Relâcher les **2 boutons d’arrêt d’urgence** en les tournant dans le sens horaire : - Sur l’écran tactile - Sur la base du robot | [](https://wiki.arn-test.noho.st/uploads/images/gallery/2023-03/UNd0-teach-panel.png)[](https://wiki.arn-test.noho.st/uploads/images/gallery/2023-03/4oK3-controller-panel.png) |
| 2 | Tourner **l’interrupteur principal** électrique en Position I | [](https://wiki.arn-test.noho.st/uploads/images/gallery/2023-03/1-main-electrical-switch.png) |
| 3 | Attendre l’ouverture du logiciel de programmation du robot et le message demandant l’allumage du contrôleur du robot « Steuerung-Ein ». Traduction : **Procédure d’initialisation APAS** - Établissement de la connexion au robot - Appuyez sur le bouton d’allumage du contrôleur - Le bouton a bien été appuyé - Le robot est prêt - Les caméras sont initialisées Si le message « es kann keine Verbindung zuum Roboter aufgebaut werden… » apparaît, c’est sûrement que le bouton d’acquittement n’a pas été maintenu actif pendant l’initialisation | [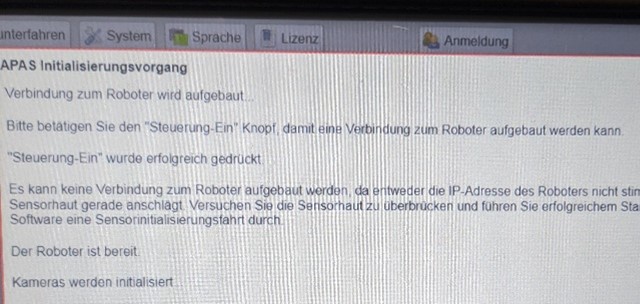](https://wiki.arn-test.noho.st/uploads/images/gallery/2023-03/SQG4-initialization-german.jpg) |
| 4 | Appuyer sur le **Bouton d’acquittement** pendant la phase d’initialisation du robot (calibrage caméra et peau). - Ce bouton est aussi dit « dispositif homme mort ». - Si la peau capacitive est désactivée (avec la clé), ou n’est pas encore calibrée (démarrage du robot), alors le mouvement du robot ne peut être commandé qu’avec ce bouton activé. Ce bouton a trois positions : - Enfoncé à moitié : acquittement actif mouvement robot autorisé, même si la peau capacitive n’est pas active - Relâché ou enfoncé complètement : acquittement annulé. Le mouvement du robot ne peut être commandé que si la peau capacitive est active et calibrée. | [](https://wiki.arn-test.noho.st/uploads/images/gallery/2023-03/5-dead-man-switch.png) |
| 5 | Démarrer le contrôleur du robot sur le **Panneau de commande** lorsque demandé pendant la phase d’initialisation « Steuerung Ein ». Rester appuyer 1 à 2 secondes. Le bouton d’acquittement doit être activé car la peau capacitive n’est pas encore active. | [](https://wiki.arn-test.noho.st/uploads/images/gallery/2023-03/4oK3-controller-panel.png) |
| 6 | Code couleur voyant sécurité : - Vert : ok - Jaune : problème avec la peau - Rouge : arrêt d’urgence / Acquittement annulé | |
| 7 | **Interrupteur à clé « Freigabe Sonderfunktion »** **(Autorisation fonction spéciale)**Pour ponter les dispositifs de protection : - La housse réactive - La surveillance du débattement de la pince. | [](https://wiki.arn-test.noho.st/uploads/images/gallery/2023-03/6-key-special-functions.png) |
| **Étape** | **Manière de procéder** | **Graphique / Élément de commande** |
| 1 | Panneau de commande des mouvements du robot | [](https://wiki.arn-test.noho.st/uploads/images/gallery/2023-03/10-commande-robot.png) |
| 2 | Définir l’orientation de la pince par rapport au sol : - Verticale vers le bas - Oblique - Horizontale | [](https://wiki.arn-test.noho.st/uploads/images/gallery/2023-03/11-aligner-pince.png) |
| 3 | Commande des mouvements du robot dans le repère : - Du robot (sa base mobile) - De la caméra - De la pince - D’un objet transporté | [](https://wiki.arn-test.noho.st/uploads/images/gallery/2023-03/12-commande-robot-type.png) |
| 4 | Coordonnées du repère de l’outil (TCP Tool Center Point) | [](https://wiki.arn-test.noho.st/uploads/images/gallery/2023-03/13-commande-robot-coordonnees.png) |
| 5 | Cette zone affiche la valeur de translation (mm) et de rotation (°) que doit effectuer le robot. La valeur sélectionnée (en vert) peut se modifier à l’aide des touches situées juste en dessous. | [](https://wiki.arn-test.noho.st/uploads/images/gallery/2023-03/15-commande-robot-scaling.png) |
| 6 | Commande dans les repères intermédiaires de la chaîne cinématique du robot | [](https://wiki.arn-test.noho.st/uploads/images/gallery/2023-03/14-commande-robot-panneau.png) |
| 7 | Mouvement de translation du TCP dans le sens de la flèche (par ex. 1). Le graphique montre la partie du bras du robot qui sera déplacée. | [](https://wiki.arn-test.noho.st/uploads/images/gallery/2023-03/16-commande-robot-translation.png) |
| 8 | Mouvement de rotation du TCP dans le sens de la flèche (par ex. 2). Le graphique montre la partie du bras du robot qui sera déplacée. | [](https://wiki.arn-test.noho.st/uploads/images/gallery/2023-03/17-commande-robot-rotation.png) |
| 9 | Commande dans le repère de la pince du robot : Un panneau pour la translation et un autre pour la rotation | [](https://wiki.arn-test.noho.st/uploads/images/gallery/2023-03/18-commande-robot-pince.png) |
| 10 | Ouverture / fermeture de la pince | [](https://wiki.arn-test.noho.st/uploads/images/gallery/2023-03/18-commande-robot-pince-ouverture.png) |
| 11 | Commutation entre mouvement de translation et rotation | [](https://wiki.arn-test.noho.st/uploads/images/gallery/2023-03/20-commande-robot-translation-rotation.png) |
| 12 | Commande dans le repère de la bride du robot (TCP par défaut) | [](https://wiki.arn-test.noho.st/uploads/images/gallery/2023-03/21-commande-robot-tcp.png) |
| 13 | Commande des coordonnées articulaires du robot. On commande directement chacun des 6 moteurs en rotation. | [](https://wiki.arn-test.noho.st/uploads/images/gallery/2023-03/22-commande-robot-articulaire.png) |
| Programmation graphique : - Séquence de blocs d’actions élémentaires - Agencement des blocs en série ou en parallèle | |
|---|---|
| Sélection et Paramétrage de blocs prédéfinis | |
| Certains blocs d’action nécessitent un apprentissage pour la configuration de ses paramètres | |
| Exemple du type d’approvisionnement en composants à manipuler avec la pince du robot (Pick & Place) : - Composants sur surface libre - Composants palettisés - Composants sur chariot guidé | |
| Saisie d’un composant avec la pince : - Exemple d’apprentissage de la trajectoire d’approche - Création des trajectoires par apprentissage de point - Gestion de la caméra intégrée | |
| \*\*Appuyer sur la touche « Accoster position\*\* \*\*d’origine ».\*\* \*\*Une fenêtre de dialogue s’ouvre.\*\* | |
|---|---|
| \*\*Appuyer sur la touche « Démarrer ».\*\* \*\*Le déplacement en position d’origine est\*\* \*\*effectué.\*\* | |
| Appuyer sur « Mettre à l’arrêt » et confirmer. Attendre que l’écran tactile et le contrôleur du robot soient éteints | |
| Couper le courant en tournant l’\*\*interrupteur principal\*\* en Position O | |
| Changer la langue en cliquant sur Langue / Sprache | |
|---|---|
| Passer en mode Ajusteur ou Administrateur. Pour pouvoir modifier les programmes | |
| Règle le pourcentage de vitesse d’exécution des programmes du robot, dit « Override ». Par ex. si vous avez défini un mouvement Cartésien droit à 20cm/s et que vous donnez un Override de 10%, la trajectoire sera exécutée par le contrôleur à une vitesse de 2cm/s | |
| \[!\[1\_main\_electrical\_switch.png\](https://wiki.arn-test.noho.st/uploads/images/gallery/2023-03/scaled-1680-/1-main-electrical-switch.png)\](https://wiki.arn-test.noho.st/uploads/images/gallery/2023-03/1-main-electrical-switch.png) | Pour comprendre les problèmes d’exécution du programme il faut ouvrir les messages de « log ». Après l’exécution d’un programme on peut supprimer les messages précédents. |
| [](https://wiki.arn-test.noho.st/uploads/images/gallery/2023-03/UNd0-teach-panel.png)[](https://wiki.arn-test.noho.st/uploads/images/gallery/2023-03/4oK3-controller-panel.png) | Relâcher les 2 **boutons d’arrêt d’urgence** en les tournant dans le sens horaire : - Sur l’écran tactile - Sur la base du robot |
|---|---|
| [](https://wiki.arn-test.noho.st/uploads/images/gallery/2023-03/1-main-electrical-switch.png) | Tourner **l’interrupteur principal** électrique en Position I |
| Attendre l’ouverture du logiciel de programmation du robot et le message demandant l’allumage du contrôleur du robot « Steuerung-Ein ». Traduction : **Procédure d’initialisation APAS** \* Etablissement de la connexion au robot \* Appuyez sur le bouton d’allumage du contrôleur. \* Le bouton a bien été appuyé \* Le robot est prêt \* Les caméras sont initialisées Si le message « es kann keine Verbindung zuum Roboter aufgebaut werden… » apparaît, c’est sûrement que le bouton d’acquittement n’a pas été maintenu actif pendant l’initialisation | |
| Appuyer sur le **Bouton d’acquittement** pendant la phase d’initialisation du robot (calibrage caméra et peau). - Ce bouton est aussi dit « dispositif homme mort ». - Si la peau capacitive est désactivée (avec la clé), ou n’est pas encore calibrée (démarrage du robot), alors le mouvement du robot ne peut être commandé qu’avec ce bouton activé. Ce bouton a trois positions : - Enfoncé à moitié : acquittement actif mouvement robot autorisé, même si la peau capacitive n’est pas active - Relâché ou enfoncé complètement : acquittement annulé. Le mouvement du robot ne peut être commandé que si la peau capacitive est active et calibrée. | |
| Démarrer le contrôleur du robot sur le **Panneau de commande** lorsque demandé pendant la phase d’initialisation « Steuerung Ein ». Rester appuyer 1 à 2 secondes. Le bouton d’acquittement doit être activé car la peau capacitive n’est pas encore active. | |
| Code couleur voyant sécurité : Vert : ok Jaune : problème avec la peau Rouge : arrêt d’urgence / Acquittement annulé | |
| **Interrupteur à clé « Freigabe Sonderfunktion »** **(Autorisation fonction spéciale)** Pour ponter les dispositifs de protection : - La housse réactive - La surveillance du débattement de la pince. |
|  | Panneau de commande des mouvements du robot |
|---|---|
|  | Définir l’orientation de la pince par rapport au sol : - Verticale vers le bas - Oblique - Horizontale |
|  | Commande des mouvements du robot dans le repère : - Du robot (sa base mobile) - De la caméra - De la pince - D’un objet transporté |
|  | Coordonnées du repère de l’outil (TCP Tool Center Point) |
|  | Cette zone affiche la valeur de translation (mm) et de rotation (°) que doit effectuer le robot. La valeur sélectionnée (en vert) peut se modifier à l’aide des touches situées juste en dessous. |
|  | Commande dans les repères intermédiaires de la chaîne cinématique du robot |
|  | Mouvement de translation du TCP dans le sens de la flèche (par ex. 1). Le graphique montre la partie du bras du robot qui sera déplacée. |
|  | Mouvement de rotation du TCP dans le sens de la flèche (par ex. 2). Le graphique montre la partie du bras du robot qui sera déplacée. |
|  | Commande dans le repère de la pince du robot : Un panneau pour la translation et un autre pour la rotation |
|  /  | Ouverture / fermeture de la pince |
|  | Commutation entre mouvement de translation et rotation |
|  | Commande dans le repère de la bride du robot (TCP par défaut) |
|  | Commande des coordonnées articulaires du robot. On commande directement chacun des 6 moteurs en rotation. |
|  | Programmation graphique : - Séquence de blocs d’actions élémentaires - Agencement des blocs en série ou en parallèle |
|---|---|
|  | Sélection et Paramétrage de blocs prédéfinis |
|  | Certains blocs d’action nécessitent un apprentissage pour la configuration de ses paramètres |
|  | Exemple du type d’approvisionnement en composants à manipuler avec la pince du robot (Pick & Place) - Composants sur surface libre - Composants palettisés - Composants sur chariot guidé |
|  | Saisie d’un composant avec la pince : - Exemple d’apprentissage de la trajectoire d’approche - Création des trajectoires par apprentissage de point - Gestion de la caméra intégrée |
|  | **Appuyer sur la touche « Accoster position** **d’origine ».** **Une fenêtre de dialogue s’ouvre.** |
|---|---|
|  | **Appuyer sur la touche « Démarrer ».** **Le déplacement en position d’origine est** **effectué.** |
|  | Appuyer sur « Mettre à l’arrêt » et confirmer. Attendre que l’écran tactile et le contrôleur du robot soient éteints |
|  | Couper le courant en tournant l’**interrupteur principal** en Position O |
|  | Changer la langue en cliquant sur Langue / Sprache |
|---|---|
|  | Passer en mode Ajusteur ou Administrateur. Pour pouvoir modifier les programmes |
|  | Règle le pourcentage de vitesse d’exécution des programmes du robot, dit « Override ». Par ex. si vous avez défini un mouvement Cartésien droit à 20cm/s et que vous donnez un Override de 10%, la trajectoire sera exécutée par le contrôleur à une vitesse de 2cm/s |
|  | Pour comprendre les problèmes d’exécution du programme il faut ouvrir les messages de « log ». Après l’exécution d’un programme on peut supprimer les messages précédents. |